El análisis de vibraciones requiere una correcta identificación de la velocidad de rotación de la máquina. La relación de las diferentes frecuencias del espectro con las RPM, identificando con gran precisión el orden de cada frecuencia, es esencial en el proceso de análisis. Esto se debe a que un error relativamente pequeño en el valor de las RPM puede causar uno significativo en el cálculo del orden de los armónicos superiores, ya que el error inicial de las RPM se multiplica. Esto puede marcar la diferencia, por ejemplo, entre identificar correctamente o no una frecuencia de fallo de un rodamiento, y también es esencial para seguir correctamente la energía de esas bandas espectrales definidas en órdenes.
Con los analizadores portátiles de vibración, la medición de la velocidad real debería formar parte del trabajo habitual de recogida de datos, incluso para aquellas máquinas (no síncronas) que no incluyen un VFD. Esto se suele hacer utilizando una luz estroboscópica, un tacómetro manual óptico/láser, o también identificando el pico espectral de 1x RPM en el espectro de vibración.
En los sistemas online, las RPM suelen medirse mediante tacómetros permanentes que hayan sido instalados o, de forma alternativa, comunicándose con el sistema de control de la máquina para obtener el dato. Sin embargo, dichas dos opciones tienen inconvenientes:
- Los tacómetros no siempre son posibles de instalar en algunas máquinas, o requieren de una instalación costosa. Además, es habitual que se produzcan problemas de mantenimiento con dicha instrumentación, por ejemplo por un mal ajuste de la separación tras un mantenimiento.
- La comunicación con los sistemas de control no siempre está permitida por la planta, o no incluye información de la variable RPM. Incluso si lo hace, a veces no proporciona el dato de RPM con la precisión necesaria. Otras veces, sólo se proporciona la referencia VFD, y ésta puede diferir significativamente de la velocidad real debido al deslizamiento en los motores de inducción.
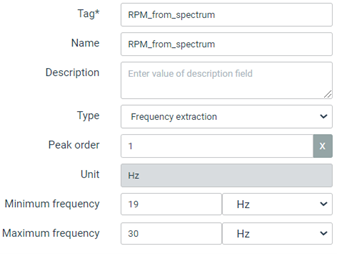
Algunos CMS de última generación permiten obtener el valor de RPM a partir de la propia vibración. Este método funciona bien en los casos en los que en el espectro se puede observar un pico claro a 1X RPM (o un armónico), lo que en realidad es muy común. Si el sistema utiliza métodos de interpolación para identificar los picos espectrales, este método puede proporcionar una excelente precisión. Por lo tanto, esta funcionalidad es muy recomendable cuando no hay ningún tacómetro instalado, o no hay posibilidad de obtener las RPM del sistema de control.
El método es recomendable incluso para aquellas máquinas que sí que incluyan un tacómetro o comunicaciones con el sistema de control, debido a los problemas comentados anteriormente con la alta tasa de fallos en la instrumentación del tacómetro o la falta de precisión del valor de RPM proporcionado por el sistema de control.
Algunos CMS permiten, incluso, utilizar una combinación de técnicas para la identificación de las RPM. Lo hacen midiendo la velocidad mediante el tacómetro instalado, si detectan que ese sensor está en buen estado, y utilizan el método de cálculo a partir de la vibración en caso contrario, o utilizando esta técnica de vibración para mejorar la precisión de las RPM proporcionadas por el sistema de control.