Programa General de Computadora para Balanceo en Dos Planos de Rotores Rígidos
Resumen
Este artículo técnico desarrolla un programa universal de computadora para el equilibrado en dos planos de rotores rígidos, mediante un tratamiento unificado del sistema y la convención para la medición de la fase, el cual puede ser usado por cualquier equipo general de balanceo.
Palabras clave: programa de computadora, equilibrado en dos planos, rotores rígidos, sistema y convención, medición de la fase, equipo de balanceo.
-
Argumentación
Debido al efecto cruzado es aconsejable el balanceo en dos planos de un rotor rígido. La solución estándar es usada para un rotor centrado, y la solución efectiva estático-par es empleada para un rotor saliente [1,2,3,4]. Todas las variables para el programa han sido completamente definidas, y los procedimientos apropiados de balanceo en dos planos para rotores centrados y salientes han sido también explicados [1,2,3,4]. Para un observador frontal del rotor rígido la localización de los cojinetes cercano, N, y lejano, F, es relativa, pero la posición de los planos izquierdo, L, y derecho, R, no cambia, y este hecho debe ser considerado para la correcta aplicación del correspondiente método de balanceo a la maquinaria rotativa [3].
El programa fue chequeado a partir de resultados previos [1,4] y a partir de nuevos datos experimentales por medio del programa en-línea para el equilibrado en dos planos de maquinaria rotante, desarrollado para el sistema de medición por adelanto de fase con la convención de la escala rotante [5], evitando una paradoja si los pesos de prueba son adheridos a 0 o 180 grados [1], así como, por el programa de equilibrado en dos planos desarrollado para el sistema de medición por adelanto de fase con la convención de la escala fija [2, 6] y utilizado para el sistema de medición por retraso de fase con la convención de la escala rotante [4].
-
Desarrollo
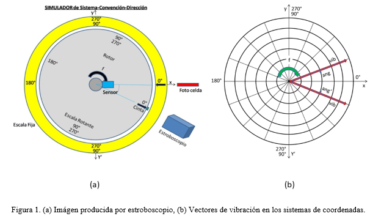
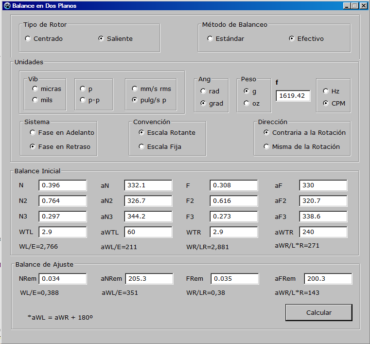
Primeramente, el Tipo de Rotor (Centrado o Saliente) y el Método de Balanceo (Estándar o Efectivo) debe ser registrado. El programa pide al usuario las Unidades de vibración (Vib) con el correspondiente ángulo (Ang), de peso (Peso) y frecuencia incluyendo su valor f. El programa requiere el método para medir los ángulos, específicamente, el Sistema de medición de la fase (Fase en Adelanto o Fase en Retraso), la Convención de fase (si los ángulos son medidos en la Escala Rotante interior o en la Escala Fija exterior) y la Dirección de la escala (si los ángulos son medidos: en la Misma dirección de Rotación del rotor o Contraria a la dirección de Rotación del rotor). En la práctica la pregunta es: si la escala angular del transportador coincide con la dirección de rotación del rotor o si es opuesta a la dirección de rotación del rotor. Con respecto al Equipo de Balanceo, en el caso del sistema de medición por Fase en Adelanto el estroboscopio y la foto celda dan idénticos valores para el ángulo de fase, pero en el caso del sistema de medición por Fase en Retraso el ángulo de fase es medido usando la fotocelda y su valor es independiente de la dirección de rotación. No obstante, el estroboscopio sincronizado por el sensor puede ser usado para la Fase en Retraso con la Escala Fija Contraria a la Rotación o con la Escala Rotante en la Misma dirección de Rotación del rotor. Las siguientes combinaciones producen un ángulo, ang, en una dirección contraria a la rotación: {(Fase en Adelanto Y Escala Rotante Y Contraria a la Rotación) O (Fase en Adelanto Y Escala Rotante Y Misma de Rotación) O (Fase en Retraso Y Escala Rotante O Escala Fija Y Misma de Rotación)}. Las siguientes combinaciones producen un ángulo, ang’ = 360° – ang = – ang, en la misma dirección de rotación: {(Fase en Adelanto Y Escala Fija Y Misma de Rotación) O (Fase en Adelanto Y Escala Fija Y Contraria a la Rotación) O (Fase en Retraso Y Escala Rotante O Escala Fija Y Contraria a la Rotación)}. SI alguna de las combinaciones precedentes ocurre ENTONCES se debe tomar la conjugada compleja de los operadores vectoriales o factores vectoriales, (VL,aVL) y (VR,aVR), en su respectivo sistema de coordenadas [1,2,4]. La Figura 1(a) ayudará a entender cada una de las combinaciones, y la Figura 1(b) muestra los vectores de vibración, (vib,ang) en el sistema de coordenadas (x,y) y (vib,ang’) en el sistema de coordenadas (x,y’), para ambos conjuntos de combinaciones. De acuerdo a los expertos, la convención del ángulo de fase puede ser extremadamente confusa, y el sistema por fase en adelanto no fue considerado [7] (aqui como fase en retraso). El algoritmo explicado en este reporte hace entendible a los ingenieros de mantenimiento el sistema y la convención para la medición de la fase.
El efecto de los pesos de prueba, (WTL,aWTL) y/o (WTR,aWTR), sobre la vibración de los cojinetes, (N,aN) y (F,aF), permite al programa Calcular el Balance Inicial, (WL,aWL) y (WR,aWR), y a partir de la vibración remanente de los cojinetes, (NRem,aNRem) y (FRem,aFRem), el Balance adicional o de Ajuste necesario, o determina el desbalance residual [4], dando resultados en coordenadas polares para cada caso.
El listado del nuevo código fuente está escrito en Lazarus (Pascal Orientado a Objetos Gratuito similar al Delphi) [8] para una computadora Dell (Intel Core 2Duo 3 GHz, memoria RAM 2 GB, Disco Duro 160 GB, Windows 7 Starter) con un monitor Samsung (Modelo SyncMaster 920LM) como sigue:


Con los siguientes resultados:
3. Conclusión
Un programa general de computadora para balanceo en dos planos de rotores rígidos ha sido desarrollado, el cual es útil para diferentes instrumentos con sistemas de medición y convenciones de fase particulares.
Referencias
- Méndez-Adriani, José A., “Considerations on the Field Balancing of the Overhung Rigid Rotors”, The Shock and Vibration Digest, Volume 37 – Number 3, May 2005, pp. 179-187, SAGE Publications.
- Méndez-Adriani, José A., “Rigid Rotor Two-Plane Balancing Solution for the Fixed Scale Convention”, Conference Proceedings of the Vibration Institute, presented in Jacksonville, Florida, USA, June 19-21, 2013, 8 pp.
- Méndez-Adriani, José A., “Invariance of Vector Factors in the Direct Solution for Two-Plane Field Balancing with the Orientation of the Overhung Rigid Rotor”, Uptime Magazine, February/March 2015, pp. 62-64.http://www.reliabilityweb.com
- Méndez-Adriani, José A., “A Two-Plane Balancing Solution for the Lag Phase Measuring System”, Uptime Magazine, October/November, 2016, pp. 52-55. http://www.reliabilityweb.com
- llc, Rotor Two Plane Balancing, Machine Maintenance, http://www.denysschen.com/Balancing/WebBalance/2PlaneBalance.aspx, 2019.
- IRD Mechanalysis, Balancing Systems Division, Balance Programs, Version 1.03.
- Ray Kelm, Dustin Pavelek and Walter Kelm, “Rotor Balancing Tutorial”, 45th Turbomachinery & 32nd Pump Symposia, Houston, Texas, September 12-15, 2016, p. 25.
- Lazarus Team, Lazarus: The Professional Free Pascal RAD IDE, Version 1.8.2, 2018, URL°http://www.lazarus-ide.org, RRID:SCR_014362.

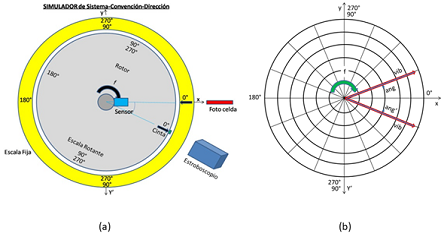



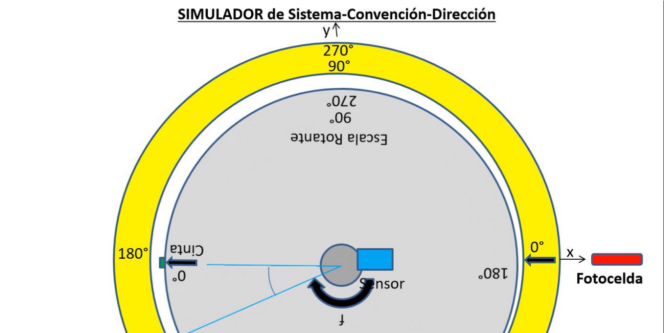
Si la dirección de rotación es contraria a las agujas del reloj entonces gire la Figura 1 verticalmente.